 |
|||||||
µ Machine Understanding
Aping as the Basis of Intelligence
More Tech Stuff:
Indexing Books: Lessons in Language Computations
Constructing a Mandelbrot Set Based Logo with Visual Basic.NET and Fireworks
July 10, 2012 by William P. Meyers
ApeWorm, an Initial Ape Project
(Overview)
The core of the system we seek is quite complex. We would like to minimize the inputs and outputs in order to focus our first project on the core aping system. At the same time, we want a general solution that is scalable to projects with larger, more complex input/output and memory requirements.
We will call our first attempt ApeWorms. These creature constructs will exist on a 5 x 5 grid and will have, for bodies, four connected line segments, the ends of which line up on the grid. Any two adjacent line segments will be able to have three relative positions: left, straight, and right {L, S, R}. An ApeWorm cannot have two segments overlapping each other. Figure 1 shows a few possible ApeWorm configurations.
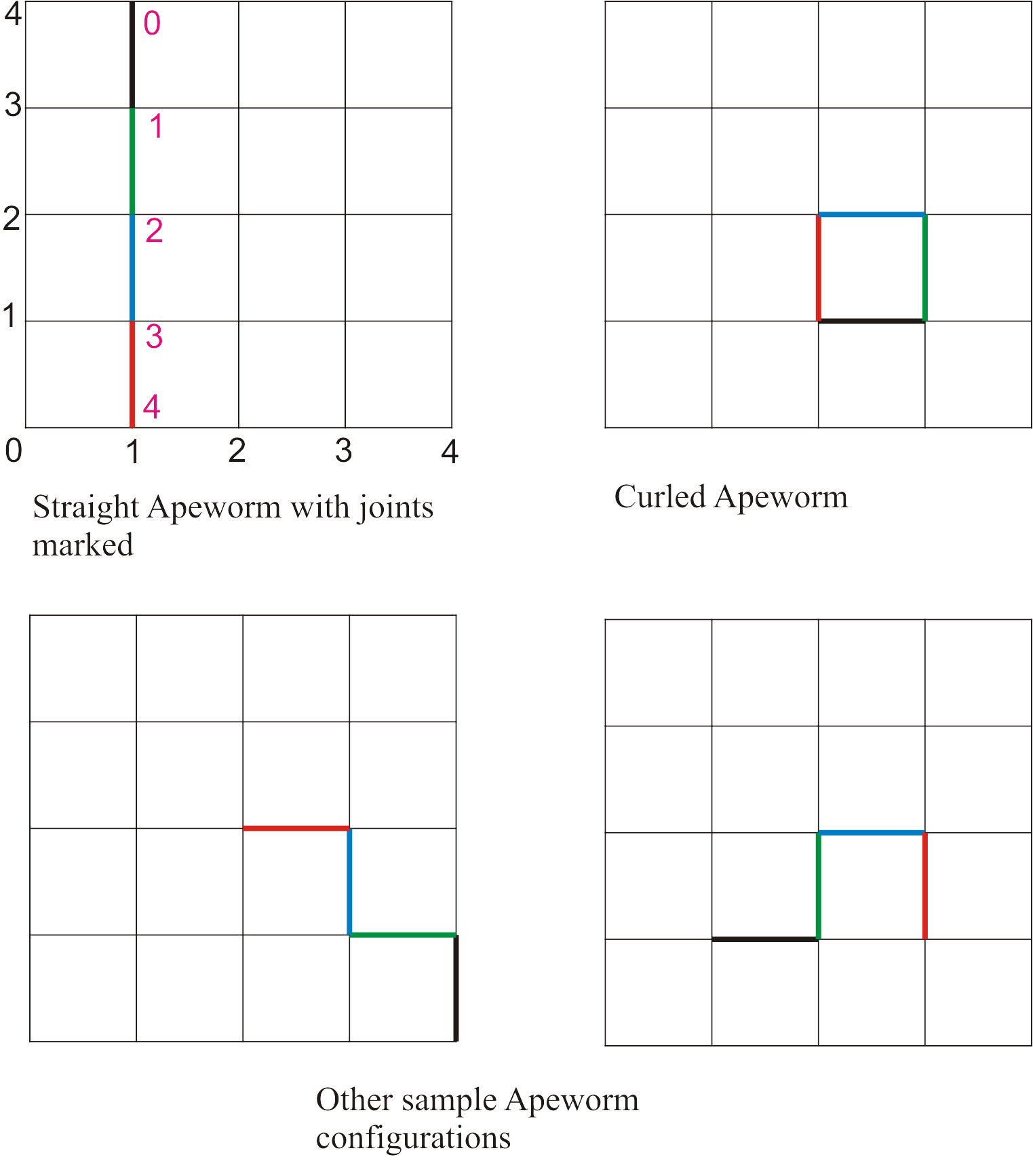
Figure 1
While ApeWorms are physically simple, their neural networks, or control software, can be as complex as we need. What should an ApeWorm know about itself, and what should it be allowed to know about an exemplar ApeWorm, if aping it is to be a non-trivial task requiring an extensible aping machine?
The ApeWorm will have one end designated the zero {0} end, with joints {1, 2, 3} and a {4} end. Each segment will be designated by its terminal joint, {1, 2, 3, 4}. Each joint will signal its relative position, going from the lower to the higher numbers, as L, S, or R (after training). The zero end and 1 joint will be able to sense their positions in the grid, again after training. For illustration purposes joints may be color designated: 1. Black 2. Green 3. Blue 4. Red. [Training adds a degree of complexity, which I suspect will be important as we move to systems more complex than ApeWorm]
How would the ApeWorm know about its exemplar? Note that it would be a trivial task, if exact information about the exemplar is known, to assign that information to the ApeWorm directly in software. But if we built two ApeWorms in the flesh, so to speak, we should have autonomous systems that require such information to cross space, so that information about position becomes encoded in some other form.
We will allow the ApeWorm to have two "eyes" on the Exemplar worm. The eyes will be at the bottom and left sides of the grid. Each eye can detect segments that are broadside to it, and their orientation by row or column and by distance from the eye.
It is tempting to ignore the temporal aspect in the first build of ApeWorm. It seems difficult enough to construct a general aping ability when the minimum requirement is to detect the position of the Exemplar worm and then provide for the ApeWorm to conform itself to a copy of that. However, going forward we will want temporal input and temporal aping.
Consider that the aping instinct evolved in animals only after basic lower functions were in place. An animal has to sense the environment, coordinate itself, catch food and escape predators just to survive. All that puts a high premium on temporal capabilities. Aping sits atop all those capabilities, just as language and culture sit atop aping. We have freed our ApeWorms from the need to eat, but we run the danger of making our aping system hard to integrate into robots and more complex programs if it is unable to at least deal with time sequences.
Next: Constructing the ApeWorm World
Previous Page
Aping as the Basis of Intelligence, beginning
copyright 2012 William P. Meyers